Motors are the muscles of robotics and automation. This guide will teach you how to control various types of motors using your Arduino, including DC motors, servo motors, and stepper motors.
Types of Motors:
- DC Motors: Simple, continuous rotation. Ideal for applications where precise positioning isn't critical, like driving wheels. Requires a motor driver (e.g., L298N, L9110S) for speed and direction control as Arduino pins can't supply enough current directly.
- Servo Motors: Offer precise angular control, usually within a 0-180 degree range. Commonly used in robotics for specific movements, such as robot arms, steering mechanisms, or camera gimbals.
- Stepper Motors: Provide very precise step-by-step movement, making them perfect for applications requiring accurate positioning and repeatable motion, like 3D printers or CNC machines.
Controlling a DC Motor (Basic):
To control a DC motor's direction and speed, you'll typically use an H-bridge motor driver.
What You'll Need:
- Arduino board
- L298N Motor Driver Module (or similar H-bridge driver)
- DC Motor (e.g., a small 3-6V motor)
- External Power Supply (e.g., 9V battery pack or power adapter for the motor)
- Jumper wires
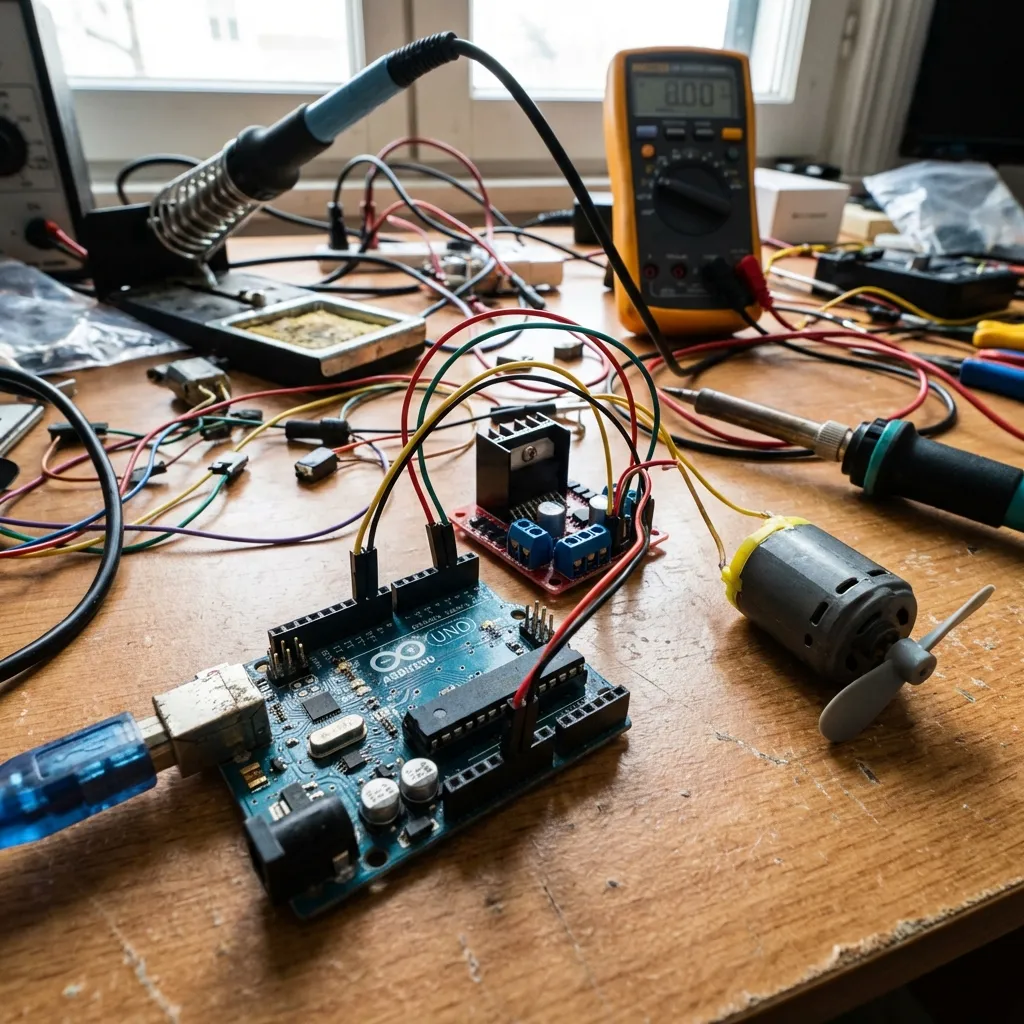
Circuit Diagram (DC Motor with L298N):
Connect your Arduino's digital pins to the IN pins of the L298N, and an Arduino PWM pin to the EN pin for speed control. Connect your motor to the OUT pins of the L298N, and provide external power to the driver.
Basic wiring for a DC motor with an L298N driver.Arduino Code (DC Motor Example):
// L298N Motor Driver Pin Definitions
const int enA = 9; // Enable pin for Motor A (Connect to Arduino PWM pin)
const int in1 = 10; // Input 1 for Motor A
const int in2 = 11; // Input 2 for Motor A
void setup() {
// Set all motor control pins as outputs
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
}
void loop() {
// Rotate motor in one direction (e.g., clockwise)
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
analogWrite(enA, 200); // Set speed to ~78% of max (0-255)
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
analogWrite(enA, 0); // Speed 0 = stop
delay(1000); // Stop for 1 second
// Rotate motor in the opposite direction (e.g., counter-clockwise)
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
analogWrite(enA, 200);
delay(2000); // Run for 2 seconds
// Stop the motor again
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
analogWrite(enA, 0);
delay(1000); // Stop for 1 second
}
Explanation:
analogWrite(enA, speed): Controls the motor speed using Pulse Width Modulation (PWM) on the enable pin.0is off,255is full speed.digitalWrite(in1, HIGH/LOW)anddigitalWrite(in2, HIGH/LOW): These control pins determine the direction of the motor's rotation.
Controlling a Servo Motor:
Servo motors are much simpler, requiring only one signal pin, power, and ground. The Arduino
Servo.h library makes control very easy.
What You'll Need:
- Arduino board
- Servo Motor (e.g., SG90 mini servo)
- Jumper wires
Arduino Code (Servo Example):
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a servo object
void setup() {
myServo.attach(9); // Attach the servo to digital pin 9
}
void loop() {
myServo.write(0); // Move servo to 0 degrees
delay(1000);
myServo.write(90); // Move servo to 90 degrees
delay(1000);
myServo.write(180); // Move servo to 180 degrees
delay(1000);
}
This is just a brief overview. Controlling different motors involves specific libraries and setup. Explore more details for stepper motors and advanced control techniques in dedicated tutorials!